I had an insightful discussion with a local sound designer who introduced me to the concept of Controllerism. We discussed the philosophy of Buchla synthesizers. Don Buchla historically rejected the standard keyboard layout in favor of touchplates to force musicians into new modes of expression.
This is exactly the energy my project needs. If I give a percussionist a keyboard or a grid of buttons they will play it like a computer. If I give them a custom surface they might play it like an instrument.
Inspired by this, I ran a head-to-head battle between two sensor types to see which could best capture this expressive capability.
WEEK 11
Rejecting Standards
Standard interfaces force standard behaviors. To get new expression, I need to build a custom surface that mimics an instrument, not a computer keyboard.
Signal Noise
Attempted to create a multi-touch surface using copper tape. The wiring was complex and the data was unstable. It felt like fighting the physics rather than using it.
The Solution
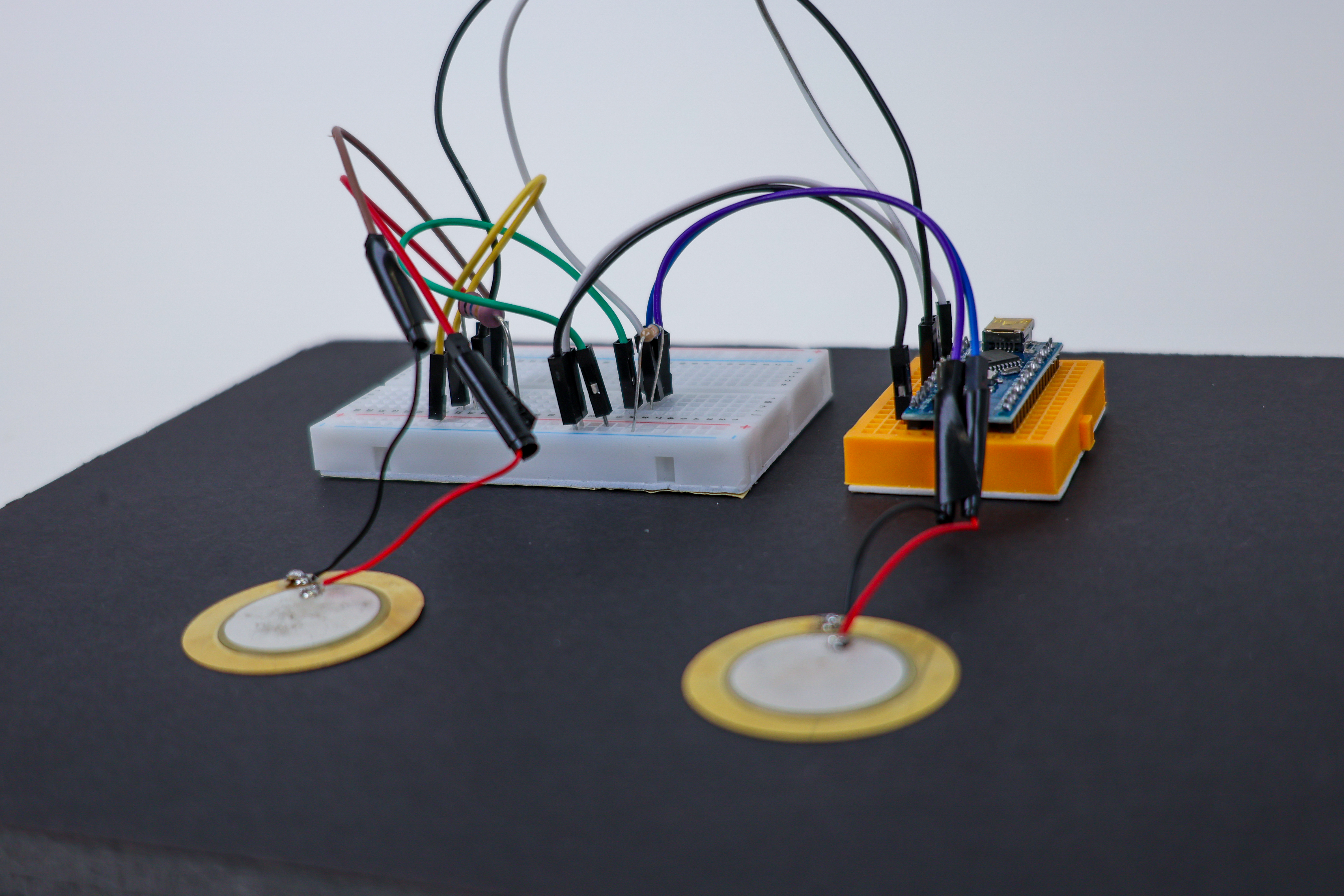
Piezo sensors capture vibration rather than just contact, mimicking drum physics. The key insight was calibrating it with a 10M Ohm resistor.
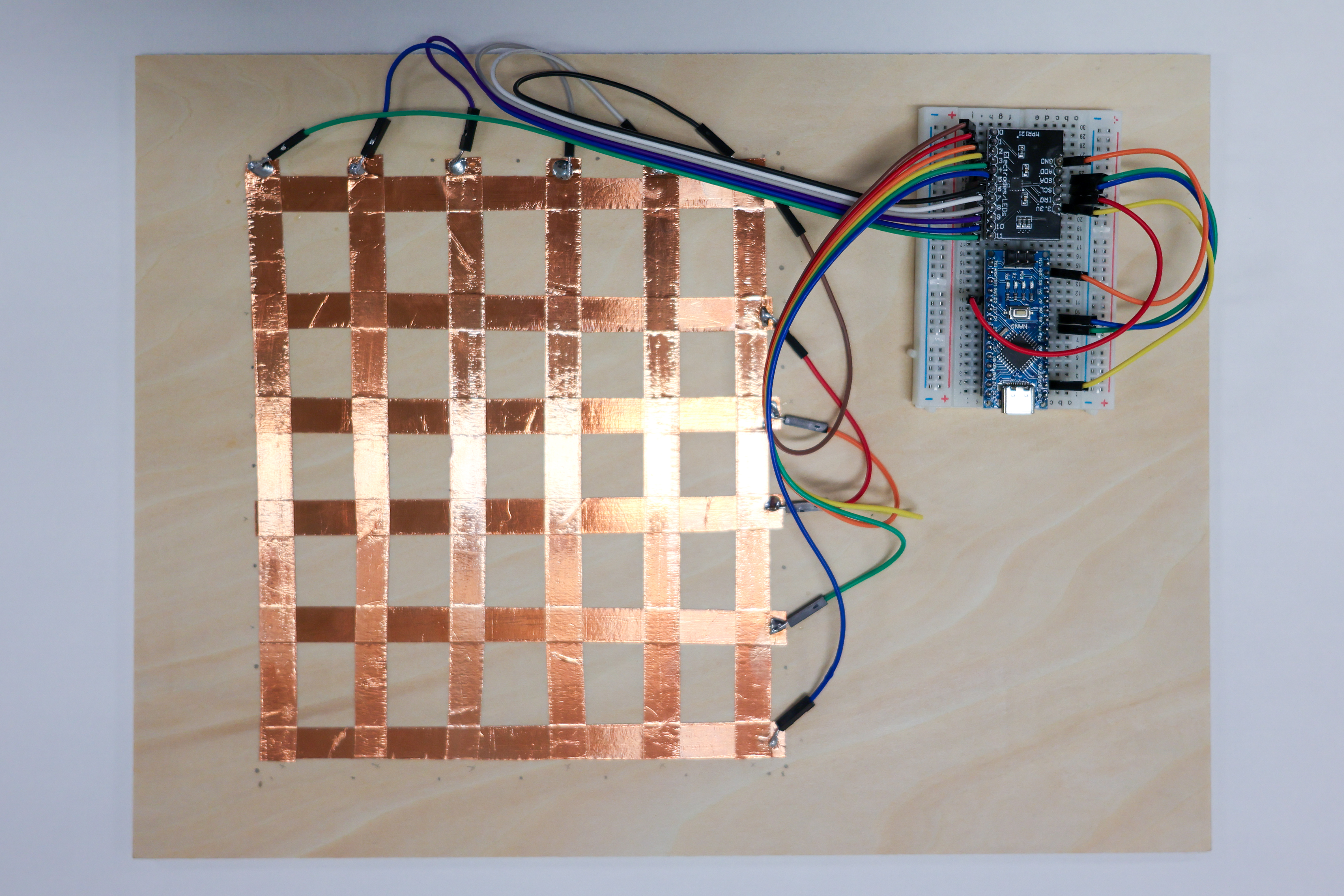
First was Experiment 4.1 using the MPR121 Capacitive Touch sensor. I constructed a grid using copper tape to create a multi-touch surface.
While the concept was strong the reality was frustrating. The wiring was complex and the capacitive sensing was incredibly sensitive to interference. It resulted in noisy and unstable data. It felt like I was fighting the physics of the hardware rather than using it.
I realized I needed something that captured the physical impact, not just the electrical presence of a finger.
I then pivoted to Experiment 4.2 using Piezo sensors. The Piezo captures vibration rather than just contact. This mimics the physics of a drum much better than capacitive touch. However, raw Piezo data is messy and it spikes voltage wildly.
The technical insight came during the calibration process. I tested various resistor values to act as a gatekeeper for the signal. I discovered that a 10M Ohm resistor placed in parallel was the magic component.
It maximized the voltage reading while filtering out the background noise. This specific circuit configuration allowed the sensor to distinguish between a soft finger tap and a hard palm strike with surprising accuracy. Finally, I have an analog input that matches the dynamic range of the percussion instruments I am studying.